
提到机器人,我们脑海中浮现的通常是金属、塑料材质的机器人。
据类生命系统(Cyborg and Bionic Systems)期刊报道,现在,除了金属和塑料,机器人也可以拥有活体细胞和组织!

这种机器人叫做生物混合机器人,利用哺乳动物的肌肉细胞作为执行器驱动,与最先进的人工执行器相比,天然的肌肉细胞具有很多优势,例如其高能量转换效率、无需电力或化石燃料能源供应、柔软和灵活,还能够自我修复!

(正在工作的机械手指,注意上方正在收缩和伸张的肌肉)
既然天然的肌肉细胞具有这么多优点,那该如何生产,或者说培养它们呢?
这就不得不提到一个关键技术——肌肉组织工程(TEM)。肌肉组织工程(TEM)是指利用生物活性物质,通过体外培养或构建生物细胞的方法,再造肌肉及组织的技术。
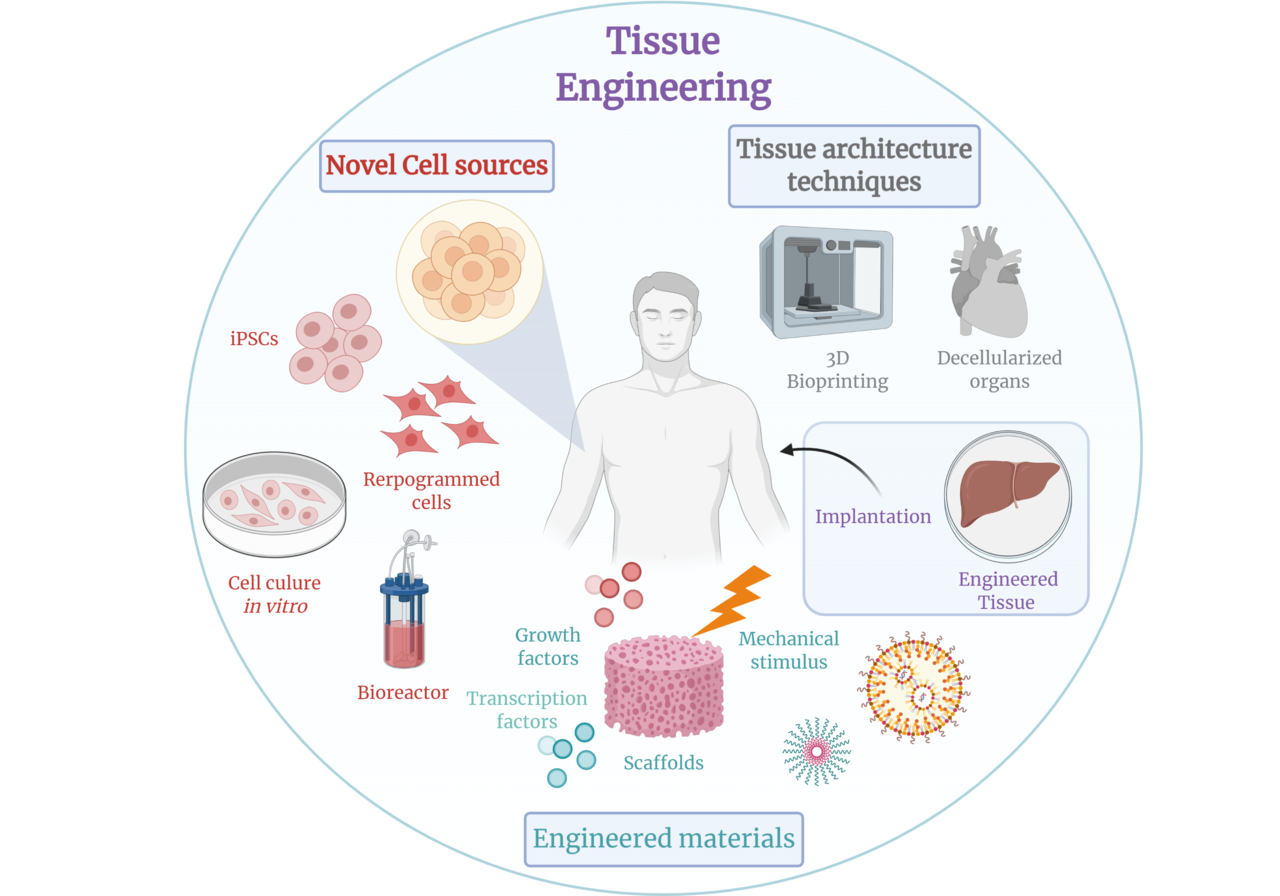
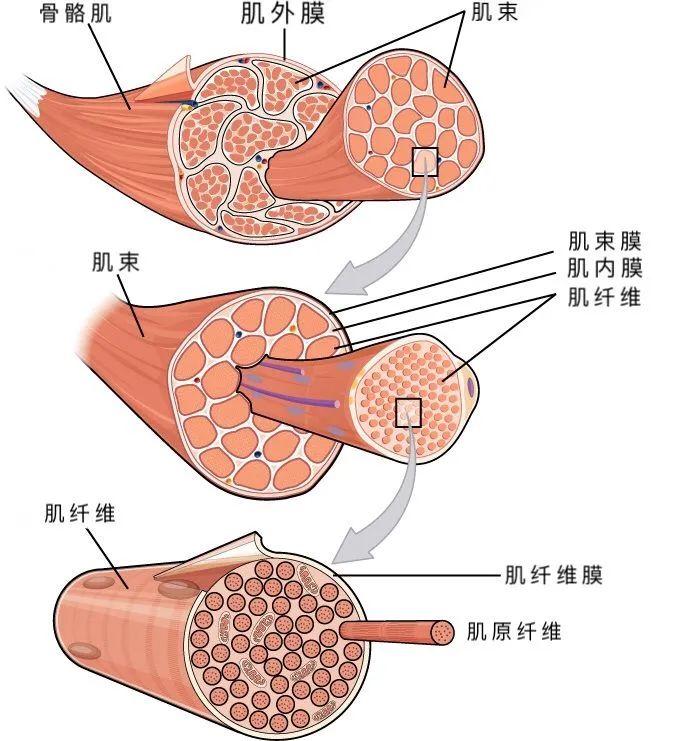
肌肉细胞中,骨骼肌细胞可以通过电刺激精确控制收缩状态和力量,是机械马达和执行器最通用的替代品。骨骼肌细胞的培养从未成熟的成肌细胞开始增值、分化、融合成肌管,成熟为肌纤维,再由大量的肌纤维组成骨骼肌细胞,这个培养过程需要1-3周的时间,还要每隔1-2天换一次培养基,这种方式不仅人工成本高,培养时间也很长。
最近,日本信州大学开发了一种TEM日常免维护培养系统,能够很好地解决骨骼肌细胞培养成本高,时间久的问题,该系统具有自动更换培养基的功能,还配备电刺激设施!

▍TEMs的开发制作
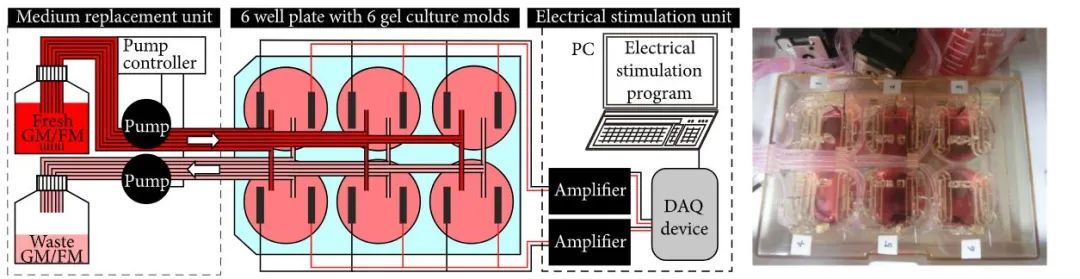
这个TEM日常免维护培养系统是通过在胶原凝胶中培养小鼠成肌细胞 C2C12 细胞制作的,由六个凝胶培养模具、一个培养基更换单元和一个电刺激单元组成。
TEMs的培养过程如下:
将细胞-凝胶混合物倒入凝胶培养模具的凹槽中,先在37°C 、5% CO2的环境中培养 1.5 小时,然后用生长培养基 (GM) 覆盖细胞-凝胶混合物,将 TEM 培养 3 天,将中间的模具取出,GM 被融合培养基 (FM) 取代,开始电刺激并持续 10 天,刺激期间每天更换FM。

TEM细胞在生长培养基中培养用于增殖,在融合培养基中培养用于分化。系统具有6个凝胶培养模具单元,每个单元可以生产两个 TEM,因此可以同时培养12 个TEM,每个凝胶培养模具都是由聚四氟乙烯(PTFE)制造的。
再来说说电刺激培养功能。系统具备自动电刺激功能,由电刺激单元对凝胶培养模具中的 TEM 施加电刺激,将 ±4 V 和 4 ms 宽度的双极脉冲应用于 TEM,以尽可能地抑制电解,双极脉冲是由数据采集 (DAQ) 设备产生的。

▍收缩力测量系统
TEM 的收缩是由场电刺激引起的,为了测量TEM的收缩力,研究人员还开发了微力测量系统,先在没有电刺激的情况下培养TEM,通过测量收缩力和收缩距离来确认 TEM 的收缩能力。然后对 TEMs 施加各种电刺激,并根据获得的收缩力探索最合适的刺激条件。

该系统由力传感器、放大器、温度控制单元、显微镜、3 轴手动平台和数据采集设备组成。
传感器的输出通过 DAQ 设备与电刺激信号同时记录到 PC;通过将已知重量的弯曲细金属线钩在传感器上,使用重力校准传感器。在测量过程中,将 TEM 放置在缓冲盐水的测量室中,温度由温控单元控制。
下图可以看出,TEM第二次电刺激的收缩力恒定在第一次刺激的 80% 左右;随着刺激的重复,收缩力逐渐从第一次的 85% 下降到 75%,这说明,尽管每一次电刺激都是短期刺激,但反复电刺激会降低 TEM 的收缩力。

除此之外,TEM的收缩力在电脉冲为1 Hz 时显着增加,而在4 Hz 时急剧下降,这说明适当施加数量的电脉冲会增强 TEM 的收缩力,而过多施加电脉冲会降低收缩力。

▍总结与展望
该研究发表在英文科技期刊Cyborg and Bionic Systems(类生命系统)中,该期刊由北京理工大学(BIT)和美国科学促进会(AAAS)/Science共同打造。

TEM肌肉能使原本没有活力的机械部分完成诸如抓握和行走等动作,从而打造出十分灵活的“赛博格”,相比传统机器人,他们对使用者和环境更加安全。
我们今天介绍的这款TEM培养系统,所生产的TEM肌肉的强度足以用于微型机器人,然而电刺激的方式会在一定程度上对TEM肌肉造成损坏,导致使用寿命不长,研究人员将会考虑使用其他刺激改善 TEM的生产,例如热刺激或机械刺激。
本文著作权属原创者所有,不代表本站立场。我们转载此文出于传播更多资讯之目的,如涉著作权事宜请联系删除。
上海市松江区莘砖公路668号双子楼A栋1003室
电话:18964878976
展会咨询QQ:515616785
传真:021-31078232



